
ここから本文です。
林業工学研究領域
|
林業工学研究領域では、木材生産や森林バイオマス資源の収穫を省力で低コスト、かつ安全に行うため、森林資源の効率的収穫作業システムの開発、森林路網の基盤整備技術の開発、森林作業の安全や効率化・軽労化技術の開発、林業機械の開発改良や制御技術の開発などを行っています。 |
研究員
| 【林業工学研究領域】 |
<キーワード> |
||
|
山口 浩和 |
ロボティクス、自動化、人間工学 |
||
|
田中 良明 |
森林作業、地形計測、作業モデル | ||
|
陣川 雅樹 |
バイオマス、チェーンソー、林業機械 |
||
|
鹿島 潤 |
防護服、騒音、振動、労働災害、人間工学、ergonomics、noise、vibration |
||
| 【森林デジタルツイン研究開発担当】 | |||
|
瀧 誠志郎 |
GIS、UAV、森林情報、ウッドサプライチェーンマネジメント |
||
| 【収穫システム研究室】 | |||
|
中澤 昌彦 |
作業システム、路網計画、ICT林業 |
||
|
大塚 大 |
作業システム、漸伐作業 |
||
|
【森林路網研究室】 |
|
||
|
白澤 紘明 |
路網計画、ライフサイクルコスト、ゾーニング | ||
|
山口 智 |
森林路網、タケ利用、施工技術、維持管理 | ||
|
宗岡 寛子 |
森林路網、路面排水、路体強度 |
||
| 【省力化技術研究室】 | |||
|
鈴木 秀典 |
作業道、路網計画、施工技術 |
||
|
上村 巧 |
伐木作業、架線集材、労働安全 |
||
|
中田 知沙 |
労働科学、作業安全 | ||
|
猪俣 雄太 |
労働負荷、路体強度、路網配置 | ||
| 【機械技術研究室】 | |||
|
伊藤 崇之 |
林業機械、架線集材、自動化 | ||
|
中込 広幸 |
自律移動ロボット、林業機械、画像処理 |
||
|
有水 賢吾 |
ロボティクス、環境認識、林業機械 |
||
|
毛綱 昌弘 |
無人化、省エネ、林業機械 |
||
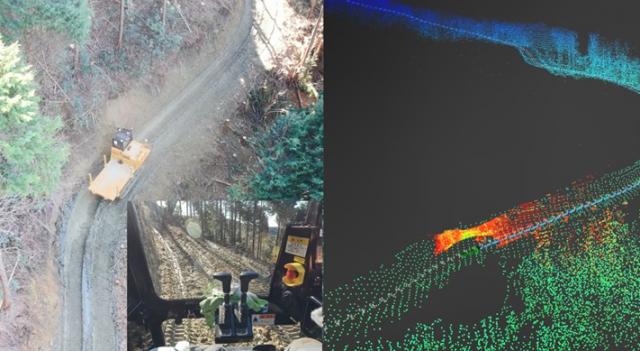
LiDAR-SLAMを用いた森林内でのフォワーダ自動運転
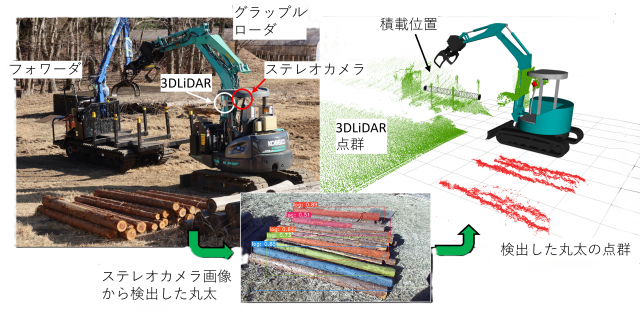
グラップルローダによる丸太積載自動化技術の開発

森林作業中の熱中症リスク計測
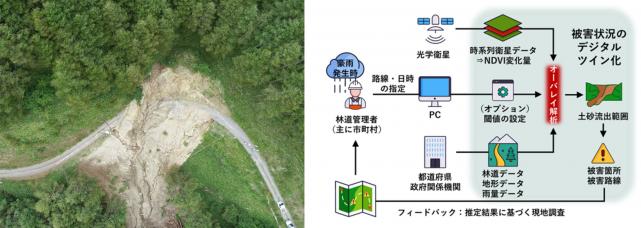
林道施設災害を対象とした被害状況把握技術・減災技術の開発

造林作業の負担軽減のための電動クローラ型1輪車の開発
研究内容
- 森林資源の効率的収穫作業システムの開発(課題群B1c)
- 森林路網の基盤整備技術の開発(課題群B1c)
- 森林作業の安全や効率化・軽労化技術の開発(課題群B1c)
- 林業機械の開発改良や制御技術の開発(課題群B1c)
主なプロジェクト
- 熟練技能の模倣学習手法を用いたグラップルローダ操作の自動化(R6~R8、科研費)
- 山地斜面に盛土してつくられた作業道は再び使用できるのか?(R6~R8、科研費)
- 道路排水による山地斜面災害発生プロセスの解明(R6~R8、科研費)
- ゲームエンジンと深層学習を用いた立木及び伐木後の材の検出手法の開発(R6~R8、科研費)
- 大規模言語モデルを用いた自動化林業機械のための潜在的危険性予測システムの開発(R7~R8、科研費)
- 身体情報を活用した林業の熱中症リスク評価の高度化(R8~R10、科研費)
Copyright © Forest Research and Management Organization. All rights reserved.