
研究紹介 > 研究成果 > 研究成果 2020年紹介分 > AIを用いて林業用作業道の検出が可能に
ここから本文です。
AIを用いて林業用作業道の検出が可能に
2020年3月13日掲載
| 論文名 |
深層畳み込みニューラルネットワークを用いたセマンティックセグメンテーションによる森林作業道抽出 |
|---|---|
| 著者(所属) |
有水 賢吾・毛綱 昌弘(林業工学研究領域) |
| 掲載誌 |
森林利用学会誌、35巻1号、7-13、森林利用学会、2020年1月 DOI:10.18945/jjfes.35.7(外部サイトへリンク) |
| 内容紹介 |
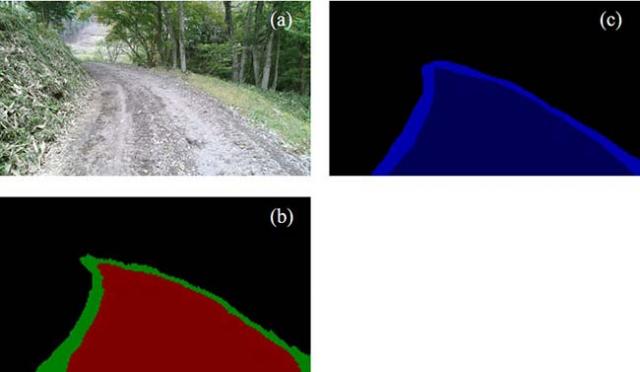
林業における人手不足解消や生産性向上のために、林業機械の自動化が求められます。林業機械が林業で用いる作業道を安全に自動走行するためには、走行可能領域(路面)を検出する必要があります。しかし境界が明確である一般道路に比べ、作業道は自然物と融合しており、路面の検出は困難でした。本研究では、画像と深層学習システムを用いたAIによる路面の検出方法を開発しました。 まず、機械走行中に前方を撮影した動画から、一定時間ごとに画像を作成しました。次に画像中の路面を目視で抽出し、正解ラベル画像を作成しました。ここでは抽出した画像に回転、色調変化などの画像処理を行った後にコンピュータに入力し、路面のパターンを学習させました。またこの作業に用いなかった写真を評価用画像とし、学習効果の検証を行いました。 学習させたコンピュータに評価用画像を読み込ませ、1ピクセル(1画素)毎に路面か背景か判別させたところ、96.7~97.5%の確率で路面を検出することができました。本研究は林業機械の自動走行に必要な画像認識手法を開発したものであり、今後の林業機械の自動化に大きく貢献する技術となります。 (本研究は2020年1月に森林利用学会誌に公表されました。)
写真:(a)実際の森林内の作業道の様子と、(b)路面の正解ラベル画像および(c)深層学習によって検出した森林作業道。(b)と(c)が類似しているほど、精度よく作業道を検出できている。 |
| お問い合わせ先 |
|
【研究推進責任者】 |
お問い合わせ
Copyright © Forest Research and Management Organization. All rights reserved.