
研究紹介 > 研究成果 > 研究成果 2021年紹介分 > 林業機械の自律走行に必要な位置情報の取得誤差を明らかにした
ここから本文です。
林業機械の自律走行に必要な位置情報の取得誤差を明らかにした
2021年11月19日掲載
| 論文名 |
林業機械における自律走行時の制御誤差に与える測位精度の影響 |
|---|---|
| 著者(所属) |
有水 賢吾・瀧 誠志郎・宗岡 寛子(林業工学研究領域) |
| 掲載誌 |
森林利用学会誌、36(4)、63-68、森林利用学会、2021年10月 DOI:10.18945/jjfes.36.193(外部サイトへリンク) |
| 内容紹介 |
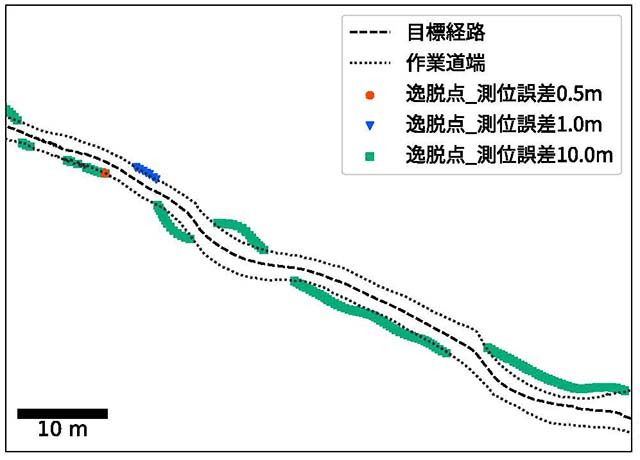
林業における人手不足解消や生産性向上のために、林業機械の自律走行が求められています。林業機械の自律走行には位置情報の取得(測位)が必須ですが、どの程度の測位誤差が存在しても自律走行が可能なのかはこれまでに示されていませんでした。本研究では林業機械が作業道を自律走行する時を想定し、測位誤差がどの程度車両の制御誤差に影響するかシミュレーションにより解析を行い、自律走行に必要な条件を明らかにしました。 幅員3.0mの作業道を走行する場合、幅1.8mの機械では許容可能な制御誤差はそれぞれ左右方向に0.6mとなります。実際の作業道を測量したデータを用い、現実に起こりえる値として測位誤差を0.5m~10mの範囲で変化させて走行シミュレーションを行った結果、いずれの測位誤差でも許容可能な制御誤差の条件を満たすことができませんでした。一方で、測位誤差が0.05m以下と低く、スリップが少ないという特定の条件下では最大制御誤差が0.6m以下となり、作業道から逸脱せず自律走行が可能であることが示唆されました。本研究は林業機械の自律走行に必要となる測位誤差の目標値および条件を明らかにしたものであり、今後の自律林業機械の開発に寄与します。
(本研究は、2021年10月に森林利用学会誌において公表されました。)
画像:走行シミュレーションによる車両の走行軌跡の一例 与えた測位誤差の位置と量は各シミュレーションによって異なるため逸脱箇所は異なるものの、測位誤差の増加に伴って作業道からの逸脱点数が増加する傾向が確認できます。 |
| お問い合わせ先 |
|
【研究推進責任者】 |
お問い合わせ
Copyright © Forest Research and Management Organization. All rights reserved.